|
Eli Bronstein Hi! I'm a second-year PhD student in Computer Science at UC Berkeley advised by Anca Dragan. I'm also affiliated with the Berkeley AI Research Lab. I'm broadly interested in human-AI interaction and creating systems that learn from and assist people. My work is supported by the NSF Computer and Information Science and Engineering Graduate Fellowship (CSGrad4US). I was previously a research engineer at Waymo research, working on learning-based planning agents for autonomous driving. My research involved reinforcement learning, closed-loop training, representation learning, motion planning, and data-driven simulation. I received a B.S. in Electrical Engineering and Computer Science from UC Berkeley, where I worked with Anca Dragan on human-robot interaction and game-theoretic planning for autonomous vehicles, and with Claire Tomlin on safe navigation in unknown environments. Email / CV / Google Scholar / LinkedIn / Github |

|
ResearchI'm interested in creating AI systems that learn from and interact with people, leveraging machine learning, reinforcement learning, and optimization. My research also involves the intersection of ML and planning for autonomous driving and other robotic systems. Representative papers are highlighted. |
|
Waymax: An Accelerated, Data-Driven Simulator for Large-Scale Autonomous
Driving Research
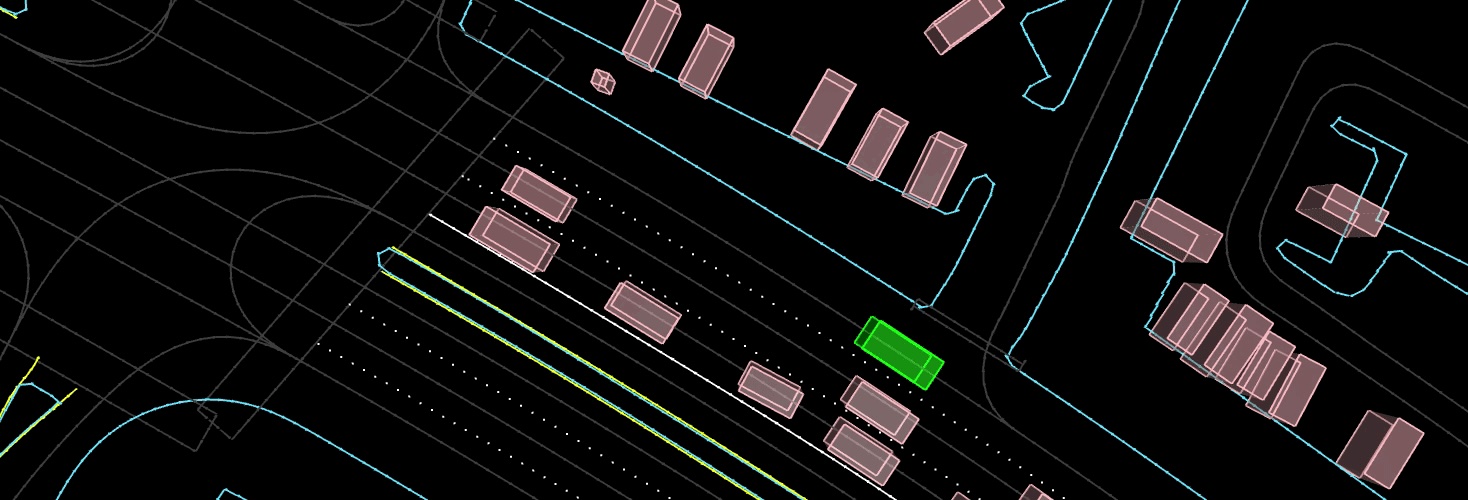
C. Gulino, J. Fu, W. Luo, G. Tucker, E. Bronstein Y. Lu, J. Harb, X. Pan, Y. Wang, X. Chen, J. D. Co-Reyes, R. Agarwal, R. Roelofs, Y. Lu, N. Montali, P. Mougin, Z. Yang, B. White, A. Faust, R. McAllister, D. Anguelov, B. Sapp Conference on Neural Information Processing Systems (NeurIPS), 2023 website / arXiv / code Waymax is a library for simulating and evaluating agents using scenarios instantiated from the Waymo Open Motion Dataset. It is designed to support behavioral research (single and multi-agent planning, behavior prediction, sim agents) using the minimal representation of objects and bounding boxes adopted by the Waymo Open Motion Dataset, without the need for users to run their own perception system from raw sensor data. Waymax is entirely written using JAX, allowing users to easily run simulations on hardware accelerators, write programs in a single computation graph, and take advantage of JAX’s functional transforms such as JIT compilation. |

|
Embedding Synthetic Off-Policy Experience for Autonomous Driving via
Zero-Shot Curricula
E. Bronstein*, S. Srinivasan*, S. Paul*, A. Sinha, Matthew O'Kelly, P. Nikdel, S. Whiteson Conference on Robot Learning (CoRL), 2022 (Oral Presentation) arXiv ML-based motion planning is a promising approach to produce agents that exhibit complex behaviors, and automatically adapt to novel environments. In the context of autonomous driving, it is common to treat all available training data equally. However, this approach produces agents that do not perform robustly in safety-critical settings, an issue that cannot be addressed by simply adding more data to the training set - we show that an agent trained using only a 10% subset of the data performs just as well as an agent trained on the entire dataset. We present a method to predict the inherent difficulty of a driving situation given data collected from a fleet of autonomous vehicles deployed on public roads. We then demonstrate that this difficulty score can be used in a zero-shot transfer to generate curricula for an imitation-learning based planning agent. Compared to training on the entire unbiased training dataset, we show that prioritizing difficult driving scenarios both reduces collisions by 15% and increases route adherence by 14% in closed-loop evaluation, all while using only 10% of the training data. |
|
Hierarchical Model-Based Imitation Learning for Planning in Autonomous
Driving
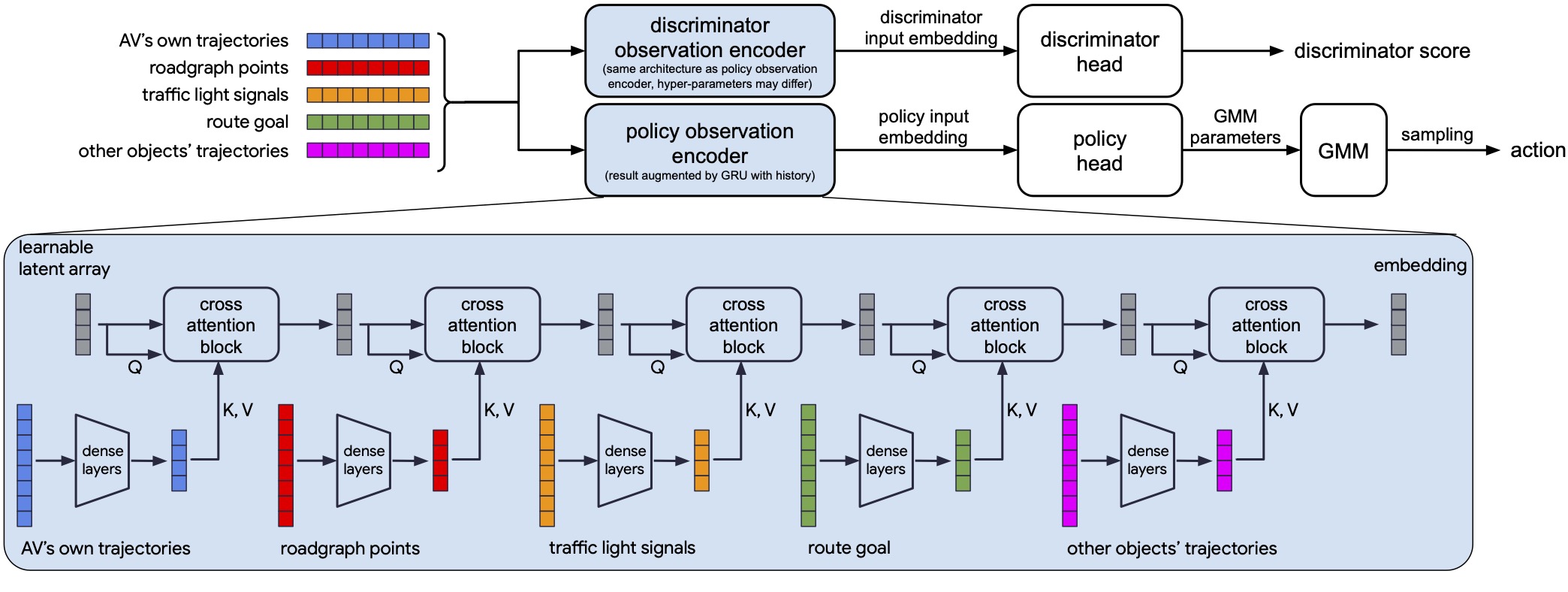
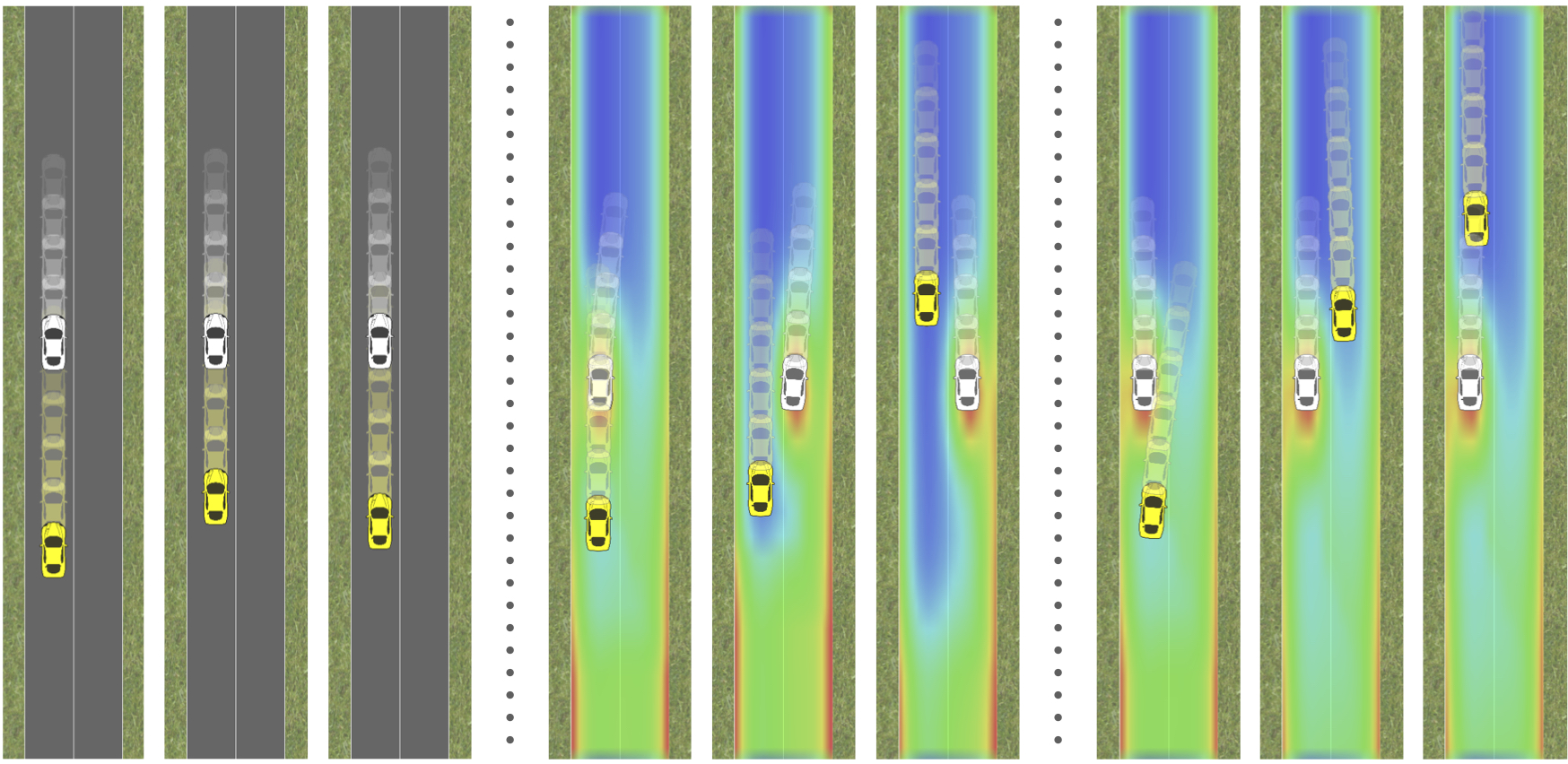
E. Bronstein, M. Palatucci, D. Notz, B. White, A. Kuefler, Y. Lu, S. Paul, P. Nikdel, P. Mougin, H. Chen, J. Fu, A. Abrams, P. Shah, E. Racah, B. Frenkel, S. Whiteson, D. Anguelov International Conference on Intelligent Robots and Systems (IROS), 2022 (Oral Presentation) arXiv We demonstrate the first large-scale application of model-based generative adversarial imitation learning (MGAIL) to the task of dense urban self-driving. We augment standard MGAIL using a hierarchical model to enable generalization to arbitrary goal routes, and measure performance using a closed-loop evaluation framework with simulated interactive agents. We train policies from expert trajectories collected from real vehicles driving over 100,000 miles in San Francisco, and demonstrate a steerable policy that can navigate robustly even in a zero-shot setting, generalizing to synthetic scenarios with novel goals that never occurred in real-world driving. We also demonstrate the importance of mixing closed-loop MGAIL losses with open-loop behavior cloning losses, and show our best policy approaches the performance of the expert. We evaluate our imitative model in both average and challenging scenarios, and show how it can serve as a useful prior to plan successful trajectories. |
|
Hierarchical Game-Theoretic Planning for Autonomous Vehicles
J. Fisac*, E. Bronstein*, E. Stefansson, D. Sadigh, S.S. Sastry, A. Dragan International Conference on Robotics and Automation (ICRA), 2019 arXiv The actions of an autonomous vehicle on the road affect and are affected by those of other drivers, whether overtaking, negotiating a merge, or avoiding an accident. This mutual dependence, best captured by dynamic game theory, creates a strong coupling between the vehicle's planning and its predictions of other drivers' behavior, and constitutes an open problem with direct implications on the safety and viability of autonomous driving technology. Unfortunately, dynamic games are too computationally demanding to meet the real-time constraints of autonomous driving in its continuous state and action space. In this paper, we introduce a novel game-theoretic trajectory planning algorithm for autonomous driving, that enables real-time performance by hierarchically decomposing the underlying dynamic game into a long-horizon" strategic" game with simplified dynamics and full information structure, and a short-horizon" tactical" game with full dynamics and a simplified information structure. The value of the strategic game is used to guide the tactical planning, implicitly extending the planning horizon, pushing the local trajectory optimization closer to global solutions, and, most importantly, quantitatively accounting for the autonomous vehicle and the human driver's ability and incentives to influence each other. In addition, our approach admits non-deterministic models of human decision-making, rather than relying on perfectly rational predictions. Our results showcase richer, safer, and more effective autonomous behavior in comparison to existing techniques. |

|
An Efficient Reachability-Based Framework for Provably Safe Autonomous
Navigation in Unknown Environments
A. Bajcsy*, S. Bansal*, E. Bronstein, V. Tolani, C. Tomlin Conference on Decision and Control (CDC), 2019 arXiv Real-world autonomous vehicles often operate in a priori unknown environments. Since most of these systems are safety-critical, it is important to ensure they operate safely in the face of environment uncertainty, such as unseen obstacles. Current safety analysis tools enable autonomous systems to reason about safety given full information about the state of the environment a priori. However, these tools do not scale well to scenarios where the environment is being sensed in real time, such as during navigation tasks. In this work, we propose a novel, real-time safety analysis method based on Hamilton-Jacobi reachability that provides strong safety guarantees despite environment uncertainty. Our safety method is planner-agnostic and provides guarantees for a variety of mapping sensors. We demonstrate our approach in simulation and in hardware to provide safety guarantees around a state-of-the-art vision-based, learning-based planner. |
|
Imitation Is Not Enough: Robustifying Imitation with Reinforcement Learning
for Challenging Driving Scenarios
Y. Lu, J. Fu, G. Tucker, X. Pan, E. Bronstein, B. Roelofs, B. Sapp, B. White, A. Faust, S. Whiteson, D. Anguelov, S. Levine Workshop on Machine Learning for Autonomous Driving, Neural Information Processing Systems (NeurIPS), 2019 Imitation learning (IL) is a simple and powerful way to use high-quality human driving data, which can be collected at scale, to identify driving preferences and produce human-like behavior. However, policies based on imitation learning alone often fail to sufficiently account for safety and reliability concerns. In this paper, we show how imitation learning combined with reinforcement learning using simple rewards can substantially improve the safety and reliability of driving policies over those learned from imitation alone. In particular, we use a combination of imitation and reinforcement learning to train a policy on over 100k miles of urban driving data, and measure its effectiveness in test scenarios grouped by different levels of collision risk. To our knowledge, this is the first application of a combined imitation and reinforcement learning approach in autonomous driving that utilizes large amounts of real-world human driving data. |
|

|
Generating Highly Predictive Probabilistic Models Of Task Durations
I. Isukapati, C. Igoe, E. Bronstein, V. Parimi, S.Smith IEEE Transactions on Intelligent Transportation Systems, March 2020 pdf / poster In many applications, uncertainty in the durations of tasks complicates the development of plans and schedules. This has given rise to a range of resilient planning and scheduling techniques that in some way rely on probabilistic models of task durations. In this paper we consider the problem of using historical data to develop probabilistic task models for such planning and scheduling techniques. We describe a novel, Bayesian hierarchical approach for constructing task duration distributions from past data, and demonstrate its effectiveness in constructing predictive probabilistic distribution models. Unlike traditional statistical learning techniques, the proposed approach relies on minimal data, is inherently adaptive to time varying task duration distribution, and provides a rich description of confidence for decision making. These ideas are demonstrated using historical data provided by a local transit authority on bus dwell times at urban bus stops. Our results show that the task distributions generated by our approach yield significantly more accurate predictions than those generated by standard regression techniques. |
Projects |
|
|
Grasp Transfer by Parts
E. Bronstein, A. Talreja Class project for EECS 106B: Robotic Manipulation and Interaction Grasping, which focuses on enabling robots to manipulate objects, is challenging because of the large space of possible grasps and object poses that must be considered. We seek to decrease the complexity of planning grasps on objects by 1) segmenting a query object into parts, and 2) transferring precomputed good grasps to these parts from parts of previously seen objects, with the novel consideration that the query object and other object need not be from the same semantic class. |

|
Extending Single-Task Policy Distillation in Reinforcement Learning
E. Bronstein, Zhe Zheng Class project for CS 294-112: Deep Reinforcement Learning Deep learning models with a large number of parameters are often unnecessarily large and time-consuming during both training and prediction. Policy distillation seeks to address this concern by distilling the policy from a larger teacher network to a smaller student network. We aim to improve the student network’s training sample complexity by considering 1) how a student network’s exploration strategy affects its learning behavior, and 2) how a student network can efficiently learn from multiple teachers of varying expertise. To address the first question, we conduct experiments with teacher and student Deep Q-Networks in the Pong environment and test several student exploration strategies (greedy, epsilon-greedy, Boltzmann, and Bayesian exploration with dropout), finding that greedy and Bayesian strategies result in minimal sample complexity. To explore the second question, we pose the problem of multi-teacher single-task policy distillation as a multi-armed bandit problem, where the teachers are the arms and the payoffs are the rewards the student receives after learning from the teachers. We show that non-contextual bandit algorithms such as random, epsilon-greedy, and UCB1 perform well when learning from multiple teachers, and UCB1 learns efficiently even when the teachers are of varying expertise. We also suggest how contextual bandit algorithms can use the state observation to decide which teacher to learn from, thus learning a holistic policy over the entire state space from teachers that are experts in subparts of the state space. |
|
Built using Jon Barron's website template. |